复数和相量¶
Complex Numbers and Phasors
在电气工程中,用于将电阻、电流或直流电压相加的数学运算使用的是所谓的实数(real numbers)。
但在处理频率依赖的正弦信号和相量时,实数并不足够。除了使用普通的实数,还引入了复数(Complex Numbers),以便求解含有负数平方根( \(\sqrt {-1}\))的复杂方程。
在电气工程中,这种数称为“虚数”(imaginary number),并用字母“j”(在电气工程中常称为 j 运算符)来表示,以区别于实数。因此,在实数前加上“ \(j\)”即表示该数为虚数,例如: \(j3、j12、j100\)等。
复数由两部分组成:一个实数部分和一个虚数部分。它们在二维的复平面(也称 S 平面)中表示为一个点,其中横轴称为实轴,纵轴称为虚轴。复数的实部和虚部分别记作 Re(z) 和 Im(z)。
由实部(有功分量)和虚部(无功分量)构成的复数,可以像在分析直流电路时使用的基本代数那样,进行加法和减法运算。
数学中用于虚数加减的规则与实数完全相同,例如 \(j2 + j4 = j6\),唯一区别在于乘法:两个虚数相乘会变成一个负的实数。实数也可以看作虚部为零的复数,记作 \(j0\)。
\(j\) 运算符的值刚好等于 \(\sqrt{-1}\),因此连续乘以 j(即 ())会依次得到以下值:
在电气工程中,j 常用来表示向量的逆时针旋转,因此每次乘以 j 或 j 的幂( \(j^2\), \(j^3\) 等)都会使向量逆时针旋转固定的 90°。同样地,如果乘积为 -j,则表示相位移 -90°,即顺时针旋转。
j运算符的向量旋转¶
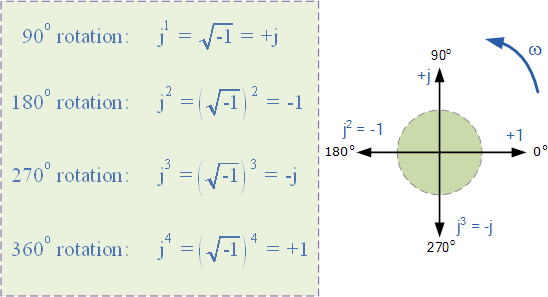
因此,将一个虚数乘以 \(j^2\) 会使向量逆时针旋转 180°;乘以 \(j^3\) 则旋转 270°;乘以 \(j^4\) 则旋转 360°,回到原始位置。乘以 \(j^{10} 或 j^{30}\) 会使向量逆时针旋转相应的角度。在每次连续旋转中,向量的幅值始终保持不变。
在电气工程中,复数既可以图形化表示,也可以数学化表示。其中一种基于余弦和正弦定理的表示方法称为笛卡尔(Cartesian)或矩形(Rectangular)形式。
使用矩形(直角坐标)形式的复数¶
Complex Numbers using the Rectangular Form
在上一节关于相量的教程中,我们了解到,复数由实部和虚部表示,其通用形式如下:
其中:
-
Z — 表示向量的复数
-
x — 实部(有功分量)
-
y — 虚部(无功分量)
-
j — 定义为 \(\sqrt{-1}\)
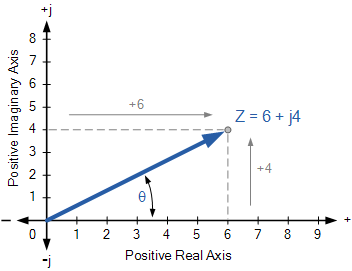
在矩形(Cartesian)形式中,复数可以表示为二维平面上的一个点,该平面称为复平面或 s 平面。例如:
\(Z = 6 + j4\)表示平面上的一点,其横坐标为 6 (实轴方向),纵坐标为 4 (虚轴方向),如图所示。
s平面中的复数
由于在矩形形式下复数的实部和虚部都可以是正数或负数,因此实轴和虚轴都必须向正负两个方向延伸。由此形成了一个被分为四个象限的复平面,称为阿尔冈图(Argand Diagram),如下所示。
四象限阿尔冈图
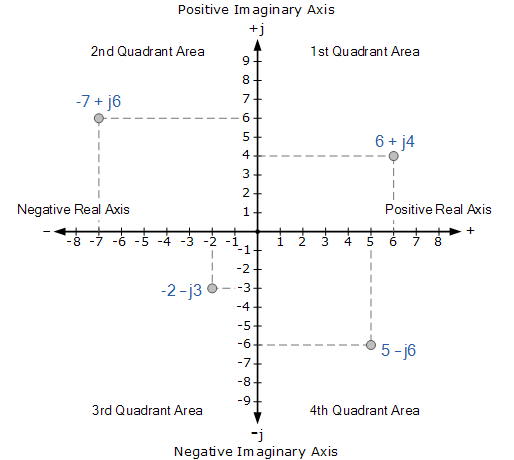
在 Argand 图中,水平轴表示实轴:竖直虚轴右侧是所有的正实数,左侧是所有的负实数;而所有正虚数都位于水平轴之上,负虚数则位于水平轴之下。由此形成了一个二维复平面,分为 Q-I、Q-II、Q-III 和 Q-IV 四个象限。
上述 Argand 图还可用于表示一个旋转相量:在复平面中,相量的幅值决定其到原点的半径,并且该相量会以 \(2\pi/\omega\) 秒为周期绕原点转一整圈。
我们可以进一步将这一思想延伸到 90° 旋转时复数的极坐标形式与矩形形式的定义。
复数也可以具有“零”实部或虚部,例如: \(Z = 6 + j0 \quad\text{或}\quad Z = 0 + j4\).在这种情况下,这些点直接绘制在实轴或虚轴上。另外,复数的角度可以通过简单的三角函数来计算直角三角形的角度,或者在 Argand 图上从正实轴开始逆时针测量。
然后,介于 \(0^\circ 和 90^\circ\) 之间的角度位于第一象限(I),介于 \(90^\circ 和 180^\circ\) 之间的角度 \(\theta\) 位于第二象限(II)。第三象限(III)包括 \(180^\circ 到 270^\circ\) 之间的角度,而第四象限(IV)则完成整圈,包括 \(270^\circ 到 360^\circ\) 之间的角度,依此类推。在所有四个象限中,相关角度可由
复数的加法与减法¶
Addition and Subtraction of Complex Numbers
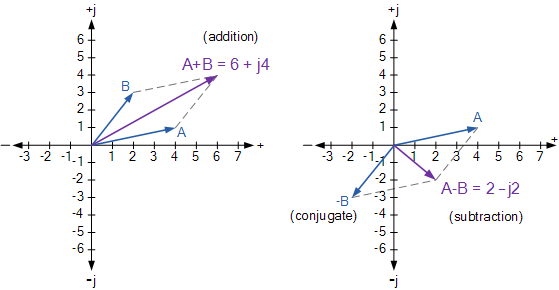
复数的加法或减法可以在矩形形式中通过数学运算或图形方式进行。对于加法,首先将实部相加以构成和的实部,然后将虚部相加以构成和的虚部;对于减法,则分别进行实部和虚部的相减。以下以两个复数 A 和 B 为例说明此过程:
复数的加减法
复数示例 1¶
定义了两个向量: \(A = 4 + j1 , B = 2 + j3\)
确定这两个向量的和与差,并分别以矩形(a + jb)形式和 Argand 图形表示。
数学加法与减法
加法:
减法:
加减法图形
复数的乘法与除法¶
在矩形形式下,复数的乘法在很大程度上遵循普通代数的相同规则,同时对于 j 运算符的连续乘积( \(j^2 = -1\))还需遵守额外的规则。因此,例如,将上面两个向量
相乘,将得到如下结果。
在数学上,以矩形形式进行复数的除法运算要稍微困难一些,因为它需要使用分母的共轭运算将方程的分母转换成一个实数。这称为“有理化”rationalising。然后,复数的除法最好使用“极坐标形式”来进行,我们稍后会讨论该形式。然而,作为在矩形形式中的一个示例,让我们来求向量 A 除以向量 B 的值。
复数共轭¶
复数的共轭(或简称共轭复数)是通过仅将复数的虚部的代数符号取反,而保持其实部的代数符号不变来得到的。用符号 \(\overline{z}\) 表示复数 \(z\) 的共轭。例如:
-
若 \(z = 6 + j4\),则其共轭为 \(\overline{z} = 6 - j4\);
-
若 \(z = 6 - j4\),则其共轭为 \(\overline{z} = 6 + j4\)。
在 Argand 图上,共轭复数与原复数在实轴上的水平位置相同,但在虚轴上的垂直位置相反。因此,共轭复数可视为原复数关于实轴的镜像。下图示例展示了复数 \(6 + j4\) 及其共轭在复平面complex plane上的位置。
共轭复数
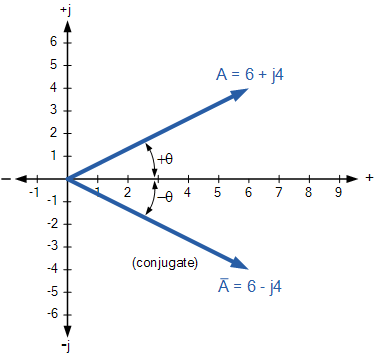
复数与其共轭的和总是一个实数,如上所示。因此,复数与其共轭相加只得到实数部分(有功分量),而它们相减则只得到虚数部分(无功分量)。复数的共轭是在电气工程中使用矩形形式计算交流电路视在功率apparent power时的一个重要工具。
极坐标形式的复数¶
与在复平面上以点表示复数的矩形形式不同,复数的极坐标形式(Polar Form)用幅值和角度来描述。因此,极坐标形式的向量写作:
其中:
-
\(Z\) 是复数的极坐标表示;
-
\(A\) 是向量的幅值(或模);
-
\(\theta\) 是其角度(或幅角),可以是正也可以是负。
该点的幅值和角度与矩形形式完全相同,只是极坐标形式下,它的位置用“三角形”triangular form方式来表示,如下所示。
复数的极坐标形式表示
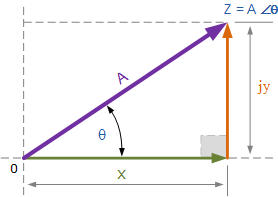
由于极坐标表示基于三角形的形式,我们可以利用简单的几何知识,特别是三角函数和勾股定理,来求取复数的幅值和角度。正如我们在学校中所学,三角函数研究三角形的边与角之间的关系,因此我们可以将这些关系描述为:
再次使用三角函数,向量 A 的角度 \(\theta\) 表示如下:
那么,在极坐标形式中,用向量 A 的长度和角度来表示复数,而不是仅仅表示一个点。同样在极坐标形式中,复数的共轭具有相同的幅值(或模),只是角度的符号发生了改变;例如, \(6\angle30^\circ\) 的共轭为 \(6\angle-30^\circ\)。
矩形形式与极坐标形式的相互转换¶
在矩形形式中,我们可以用向量的矩形坐标来表示它,其中水平轴是其实轴,垂直轴是其虚轴(或 j 分量)。在极坐标形式中,这两个轴则简单地用 \(A\angle\theta\)来表示。以上述例子为例,矩形形式与极坐标形式之间的关系可定义如下:
将极坐标形式转换为矩形形式(P→R)¶
我们也可以按如下方式将矩形形式转换回极坐标形式。
将矩形形式转换为极坐标形式(R→P)¶
极坐标形式的乘法与除法¶
如上所述,矩形形式最适合对复数进行加法和减法运算,但极坐标形式在乘法和除法运算中通常更为简便。要将两个极坐标形式的向量相乘,必须首先将它们的模相乘,然后将它们的角度相加。
极坐标形式下的乘法¶
将极坐标形式下的 \(6\angle30^\circ 与 8\angle-45^\circ\) 相乘,得到:
极坐标形式下的除法¶
同样地,要将两个向量以极坐标形式相除,我们需要将它们的模相除,然后将它们的角度相减,如下所示。
幸好,现代的科学计算器内置了数学函数(详见教材),能够方便地将矩形形式转换为极坐标形式(R → P),也能将极坐标形式转换回矩形形式(P → R)。
指数形式的复数¶
到目前为止,我们已经讨论了复数的矩形形式( \(a + jb\))和极坐标形式( \(A ∠ ±θ\))。但还有第三种与极坐标形式类似的方法,也能对应正弦信号的幅度(模)和相角,只是它使用自然对数的底数 \(e \approx 2.718281\ldots\) 来表示复数的值。这种方法称为指数形式。
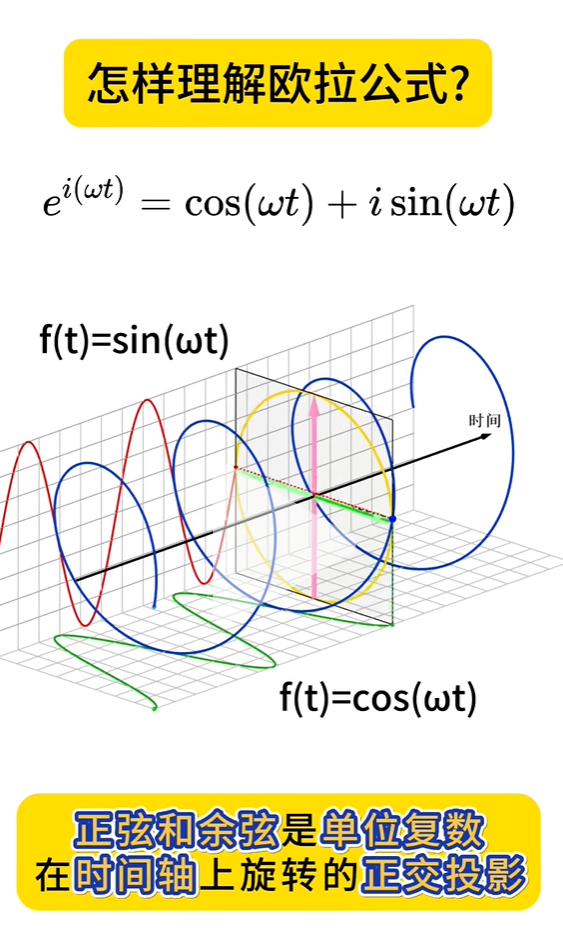
指数形式利用直角三角形的正弦(\(\sin\))和余弦(\(\cos\))函数,将复指数视为复平面中随角度旋转的点。该点位置的指数形式基于瑞士数学家欧拉(Leonhard Euler)提出的欧拉恒等式,其表达为:
首先要区分两条常见的“欧拉公式”:
- 欧拉公式(Euler’s Formula)
\[ e^{j\theta} = \cos\theta + j\sin\theta \]这是描述复指数与三角函数之间关系的通用公式。
- 欧拉恒等式(Euler’s Identity)
\[ e^{j\pi} + 1 = 0 \]它是把上面公式带入 \(\theta = \pi\) 得到的一个优美特例,也常被称作“最美等式”。
从 \(e^{j\theta} = \cos\theta + j\sin\theta\) 推导出 \(Z = A e^{j\phi}\)
- 写出复数的极坐标形式 极坐标形式下,一个复数 \(Z\) 的幅值(模)为 \(A\),相角为 \(\phi\),记作
\[ Z = A\angle\phi \]
- 利用欧拉公式 根据欧拉公式
\[ e^{j\phi} = \cos\phi + j\sin\phi \]
- 两边同乘以幅值 A
\[ A\,e^{j\phi} = A\bigl(\cos\phi + j\sin\phi\bigr). \]
- 对照矩形形式 右边正是复数的矩形表达式,其中
\[ x = A\cos\phi,\quad y = A\sin\phi \]因此\[ A e^{j\phi} \;=\; x + j\,y \;=\; Z \]
至此,我们便从欧拉公式得到了指数形式与矩形/极坐标形式的等价关系:
\[ \boxed{Z = x + jy = A(\cos\phi + j\sin\phi) = A\,e^{j\phi}.} \]
那么,欧拉恒等式可以通过下图所示的复平面上旋转相量图来表示。
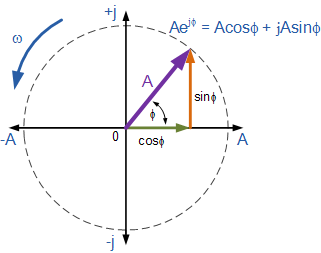
我们可以看到,欧拉恒等式与上面介绍的极坐标形式非常相似,它向我们展示了像 \(Ae^{j\theta}\) 这样幅值为 1 的数也是一个复数。我们不仅可以很容易地将指数形式的复数转换为极坐标形式,例如:
而且欧拉恒等式还为我们提供了一种将复数从指数形式转换为矩形形式的方法。然后,在定义复数时,指数形式、极坐标形式和矩形形式之间的关系可以表示为:
相量表示法¶
到目前为止,我们已经研究了使用复数在复平面上定义旋转向量或静止向量的不同表示方法。相量表示法是构造一个包含给定正弦波形的振幅和相位角的单一复数的过程。
然后,相量表示法(有时也称为相量变换)将正弦函数
的实部从时域转换到复数域,也称为频域。例如:
请注意, \(\sqrt 2\) 将最大振幅转换为有效值(RMS),相位角以弧度( \(\omega\))表示。
复数小结¶
-
复数由两部分组成:一个实数和一个虚数。
-
虚数通过 \(j\) 运算符与实数区分。
-
在复平面中,前面带 \(j\)的数即表示虚数。
-
按定义, \(j\) 运算符 \(j\equiv\sqrt{-1}\)。
-
虚数可以像实数一样进行加、减、乘、除运算。
-
\(j\) 与 \(j\) 相乘得 \(j^2=-1\)。
-
在矩形形式下,复数在复平面中表示为一点:
- 在极坐标形式下,复数表示为一条具有幅值和相位的向量:
- 在指数形式下,复数表示为自然对数底 e 的指数和相位:
- 这三种等价表示:
-
欧拉公式可用于在指数形式与矩形形式之间互相转换。
-
在前述教程中(包括本教程),我们看到可以用相量来表示正弦波形,其幅值和相位角都写作复数。
-
复数可以在矩形、极坐标、指数三种形式之间相互转换,并可在这些形式下进行加、减、乘、除运算。
接下来的几节教程将着眼于交流串联电路中的相量关系,首先研究常见无源元件的阻抗,并绘制其电流相量和电压相量图,从交流电阻开始。
附录¶
单词表¶
1. 基础运算¶
| English Term | 中文翻译 |
| Real Number | 实数 |
| Imaginary Number | 虚数 |
| Complex Number | 复数 |
| Addition | 加法 |
| Subtraction | 减法 |
| Multiplication | 乘法 |
| Division | 除法 |
| Taylor Series / Maclaurin Series | 泰勒级数 / Maclaurin 级数 |
| Differential Equation | 微分方程 |
2.复数运算与表示¶
| English Term | 中文翻译 |
| j-operator (j) | j 运算符 |
| Conjugate / Complex Conjugate | 共轭 / 复数共轭 |
| Cartesian Form (Rectangular Form) | 笛卡尔形式(矩形形式) |
| Polar Form | 极坐标形式 |
| Exponential Form | 指数形式 |
| Modulus (Magnitude) | 幅值(模) |
| Argument (Phase Angle) | 幅角(相角) |
| RMS (Root Mean Square) | 有效值(均方根) |
| Euler’s Formula / Euler’s Identity | 欧拉公式 / 欧拉恒等式 |
3. 几何与三角¶
| English Term | 中文翻译 |
| Argand Diagram | 阿尔冈图 |
| Quadrant (Q-I, Q-II, Q-III, Q-IV) | 象限(I、II、III、IV) |
| Real Axis / Imaginary Axis | 实轴 / 虚轴 |
| S-plane | S 平面 |
| Trigonometry | 三角函数(或三角学) |
| Pythagoras’s Theorem | 勾股定理 |
| Cosine (cos) | 余弦 |
| Sine (sin) | 正弦 |
| Tangent (tan) | 正切 |
| Rotation | 旋转 |
4. 电气工程与相量¶
| English Term | 中文翻译 |
| Phasor / Phasor Notation | 相量 / 相量表示法 |
| Phasor Transform | 相量变换 |
| Sinusoidal Waveform | 正弦波形 |
| Frequency Domain / Time Domain | 频域 / 时域 |
| AC (Alternating Current) / DC (Direct Current) | 交流 / 直流 |
| Impedance | 阻抗 |
| V(t) (Voltage as a function of time) | 时域电压(伏特随时间的函数 V(t)) |
欧拉公式的证明¶
下面给出两种常见且较为详尽的证明方法:
一、级数展开法(Maclaurin 级数)¶
我们从以下三个函数的 Maclaurin(泰勒)级数开始:
- 指数函数
- 余弦函数
- 正弦函数
1. 将指数级数中的 \(x\) 替换为 \(j\theta\)¶
把 \(x=j\theta\) 代入指数函数级数:
2. 分离奇偶项¶
将上式按 \(n\) 的奇偶性拆成两个和:
- 偶数项 \(n=2k\):
对应的部分是
奇数项 \(n=2k+1\):
对应的部分是
3. 合并奇偶两部分¶
收敛性说明:这三个级数在全实数域(甚至全复数域)均绝对收敛,可在同一区域内自由拆合、代入,从而保证级数运算合法。
二、微分方程法¶
定义两函数
它们分别满足相同的一阶常微分方程及相同初值:
- 微分方程
- 初值条件
根据常微分方程的唯一解定理(在全复域内此方程线性且解析,解唯一),得
即
三、几何意义(补充)¶
- 在复平面上,将复指数定义为连续旋转并保持单位长度的“相量”:
表明该向量的速度方向总与自身垂直(乘以 j 即逆时针旋转 90°),恰是绕原点以单位角速度逆时针旋转的运动轨迹。
结论:无论是从级数展开还是从微分方程来看,甚至从几何旋转直观上,
都成立且证明简洁。
下图来自学习之光,可以更好的理解欧拉公式
声明¶
本文翻译自 electronics-tutorials
本文仅供学习,禁止用于任何的商业用途。